ChatGPT a marqué l’avènement de l’IA générative. Les réponses peuvent être générées en réponse à presque n’importe quelle requête, ce qui permet de transformer le travail numérique dans des domaines comme la création de contenu, le service à la clientèle, le développement de logiciels et les opérations commerciales pour les spécialistes du savoir.
L’IA physique, incarnation de l’intelligence artificielle dans les humanoïdes, les usines et d’autres appareils au sein de systèmes industriels, n’a pas encore connu cette percée.
Cela a freiné certains secteurs, comme le transport et la mobilité, la fabrication, la logistique et la robotique. Mais cela est sur le point de changer grâce à trois ordinateurs qui combinent l’entraînement avancé, la simulation et l’inférence.
L’essor de l’IA physique multimodale
Pendant 60 ans, le « Logiciel 1.0 », un code de série écrit par des programmeurs humains, a été exécuté sur des ordinateurs généralistes propulsés par un CPU.
Puis, en 2012, Alex Krizhevsky, parrainé par Ilya Sutskever et Geoffrey Hinton, a remporté la compétition de reconnaissance d’images informatiques ImageNet avec AlexNet, un modèle de Deep Learning revolutionnaire pour le classement d’images.
Il s’agissait du premier contact de l’industrie avec l’IA. L’avènement de l’apprentissage automatique, c’est-à-dire de réseaux neuronaux fonctionnant sur des GPU, a ouvert l’ère du Logiciel 2.0.
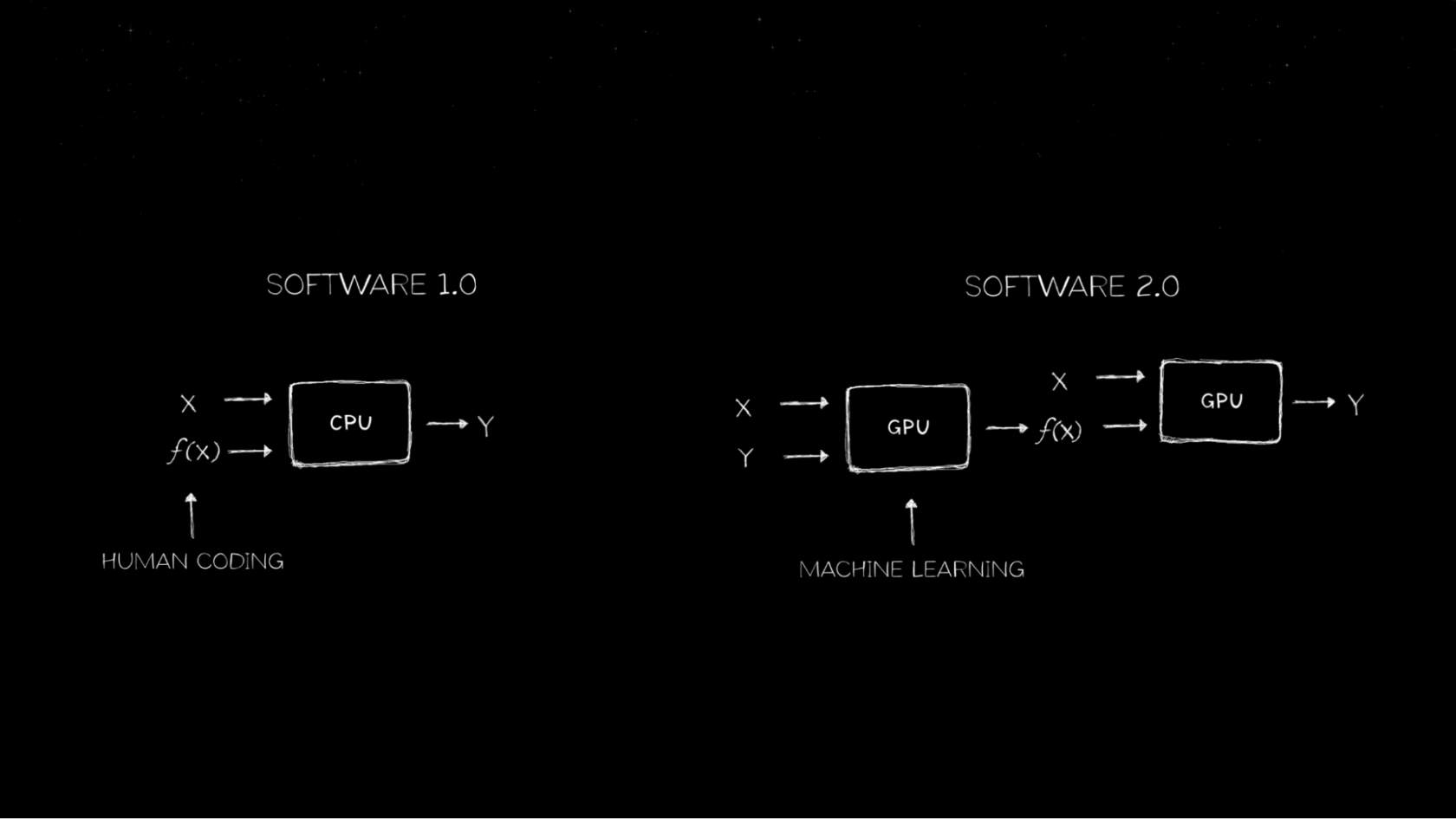
Aujourd’hui, les logiciels écrivent des logiciels. Les charges de travail informatiques mondiales passent du calcul généraliste sur CPU au calcul accéléré sur GPU, ce qui laisse la loi de Moore loin derrière.
Avec l’IA générative, les modèles de transformation et de diffusion multimodaux ont été entraînés pour générer des réponses.
Les grands modèles de langage sont uni-dimensionnels, capables de prédire le prochain jeton, dans des modes utilisant des lettres ou des mots. Les modèles de génération d’images et de vidéos sont bi-dimensionnels, capables de prédire le prochain pixel.
Aucun de ces modèles ne peut appréhender ou interpréter le monde tri-dimensionnel. Et c’est là que l’IA physique entre en jeu.
Les modèles d’IA physique peuvent percevoir, comprendre, interagir avec le monde physique et naviguer en son sein, grâce à l’IA générative. Avec le calcul accéléré, les avancées de l’IA physique multimodale et les simulations physiques à grande échelle permettent au monde de réaliser l’importance de l’IA physique au travers des robots.
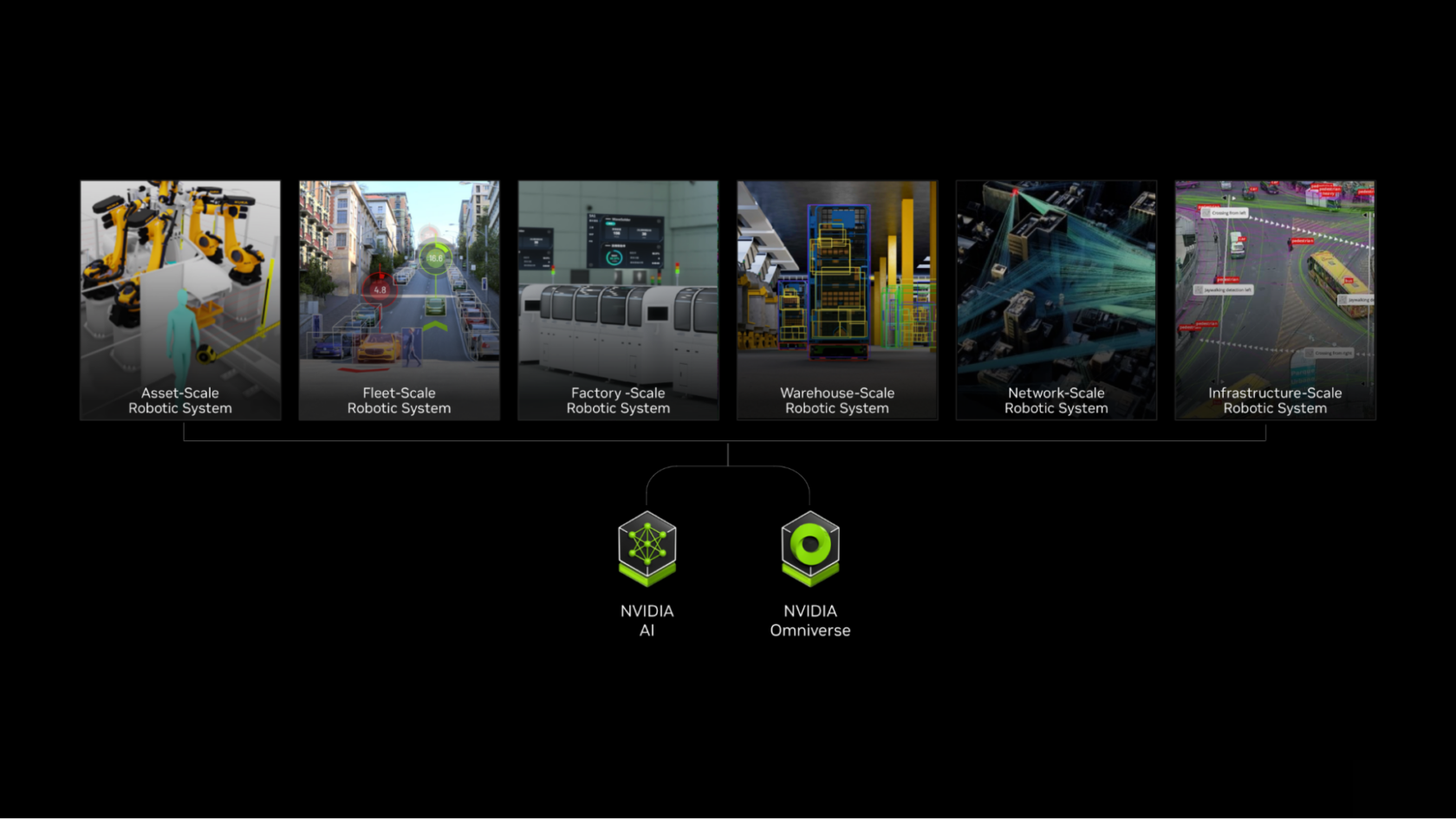
Un robot est un système qui peut percevoir, raisonner, planifier, agir et apprendre. Les robots sont souvent associés aux robots mobiles autonomes (AMR), aux bras manipulateurs ou aux humanoïdes. Mais il existe de nombreuses autres formes d’incarnations robotiques.
Dans un proche avenir, tout ce qui est en mouvement ou surveille des choses en mouvement, consistera en un système robotique autonome. Ces systèmes seront capables de détecter et de réagir à leurs environnements.
Tout, des salles d’opération aux datacenters, des entrepôts aux usines, même les systèmes de contrôle de la circulation ou les villes intelligentes entières, passera de systèmes statiques à commande manuelle à des systèmes autonomes et interactifs incarnés par l’IA physique.
La prochaine frontière : les robots humanoïdes
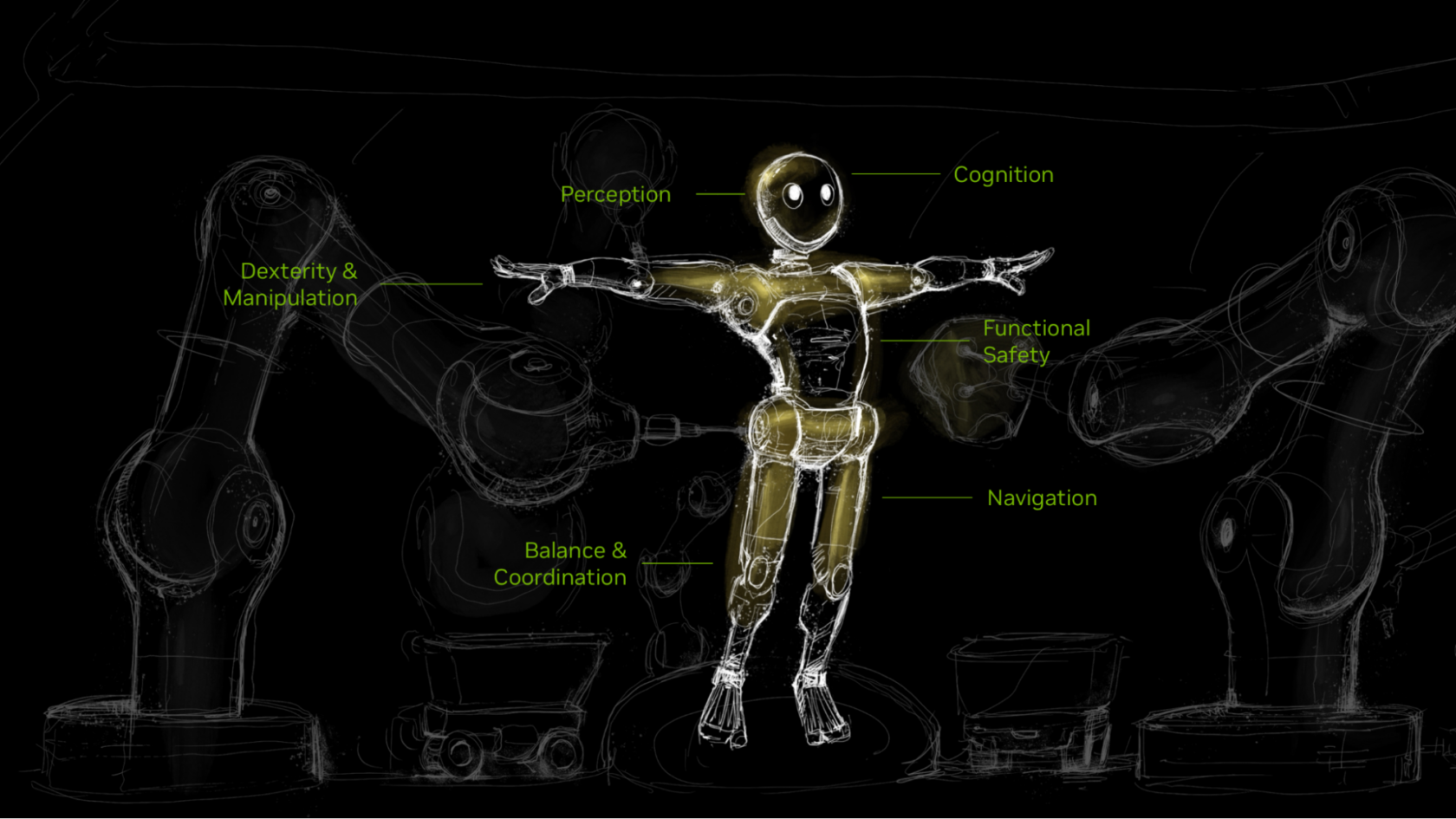
Les robots humanoïdes sont une manifestation idéale de la robotique générale, car ils peuvent fonctionner efficacement dans des environnements créés pour les humains, tout en nécessitant des ajustements minimes lors de leur déploiement et de leur exploitation.
Selon Goldman Sachs, le marché mondial des robots humanoïdes devrait atteindre 38 milliards de dollars d’ici 2035, soit une multiplication par 6 des 6 milliards de dollars prévus pour la même période il y a près de deux ans.
Les chercheurs et les développeurs du monde entier se pressent pour construire cette nouvelle vague de robots.
Trois ordinateurs pour développer l’IA physique
Pour développer des robots humanoïdes, trois systèmes informatiques accélérés sont nécessaires pour gérer l’IA physique et l’entraînement, la simulation et l’exécution des robots. Deux avancées informatiques accélèrent le développement des robots humanoïdes : les modèles de fondation multimodaux et les simulations physiques évolutives des robots et de leurs mondes.
Les avancées de l’IA générative apportent aux robots la perception 3D, le contrôle, la planification des compétences et l’intelligence. La simulation robotique à grande échelle permet aux développeurs de perfectionner, de tester et d’optimiser les compétences des robots dans un monde virtuel qui imite les lois de la physique, ce qui permet de réduire les coûts d’acquisition de données réelles et de s’assurer qu’ils peuvent fonctionner correctement dans des endroits sécurisés et contrôlés.
NVIDIA a construit trois ordinateurs et accéléré des plateformes de développement pour permettre aux développeurs de créer l’IA physique.
Tout d’abord, les modèles sont entraînés sur un supercalculateur. Les développeurs peuvent utiliser NVIDIA NeMo sur la plateforme NVIDIA DGX pour entraîner et perfectionner des modèles de fondation et d’IA générative puissants. Ils peuvent également exploiter NVIDIA Project GR00T, une initiative visant à développer des modèles de fondation généralistes pour robots humanoïdes afin de leur permettre de comprendre le langage naturel et de reproduire les mouvements en observant des actions humaines.
Deuxièmement, NVIDIA Omniverse, qui s’exécute sur des serveurs NVIDIA OVX, fournit la plateforme de développement et l’environnement de simulation permettant de tester et d’optimiser l’IA physique avec des interfaces de programmation d’applications et des frameworks comme NVIDIA Isaac Sim.
Les développeurs peuvent utiliser Isaac Sim pour simuler et valider des modèles de robots, ou générer des quantités massives de données synthétiques basées sur la physique pour amorçer l’entraînement des modèles robotiques. Les chercheurs et les développeurs peuvent également utiliser NVIDIA Isaac Lab, un framework open-source d’apprentissage de robots sur lequel s’appuient l’apprentissage par renforcement et l’apprentissage par imitation des robots, pour accélérer l’entraînement et le perfectionnement des politiques robotiques.

Enfin, les modèles d’IA entraînés sont déployés sur une unité d’exécution. Les ordinateurs de robotique NVIDIA Jetson Thor sont spécifiquement conçus pour répondre aux besoins d’informatique compacte et embarquée. Un ensemble de modèles constitué de politiques de contrôle, de modèles de vision et de langage compose le cerveau du robot et est déployé sur un système Edge Computing embarqué peu énergivore.
Selon leurs workflows et leurs domaines d’applications, les fabricants de robots et les développeurs de modèles de fondation peuvent utiliser autant de plateformes et de systèmes de calcul accéléré que nécessaire.
Construire la nouvelle vague d’installations autonomes
Les installations robotiques constituent l’apogée de toutes ces technologies.
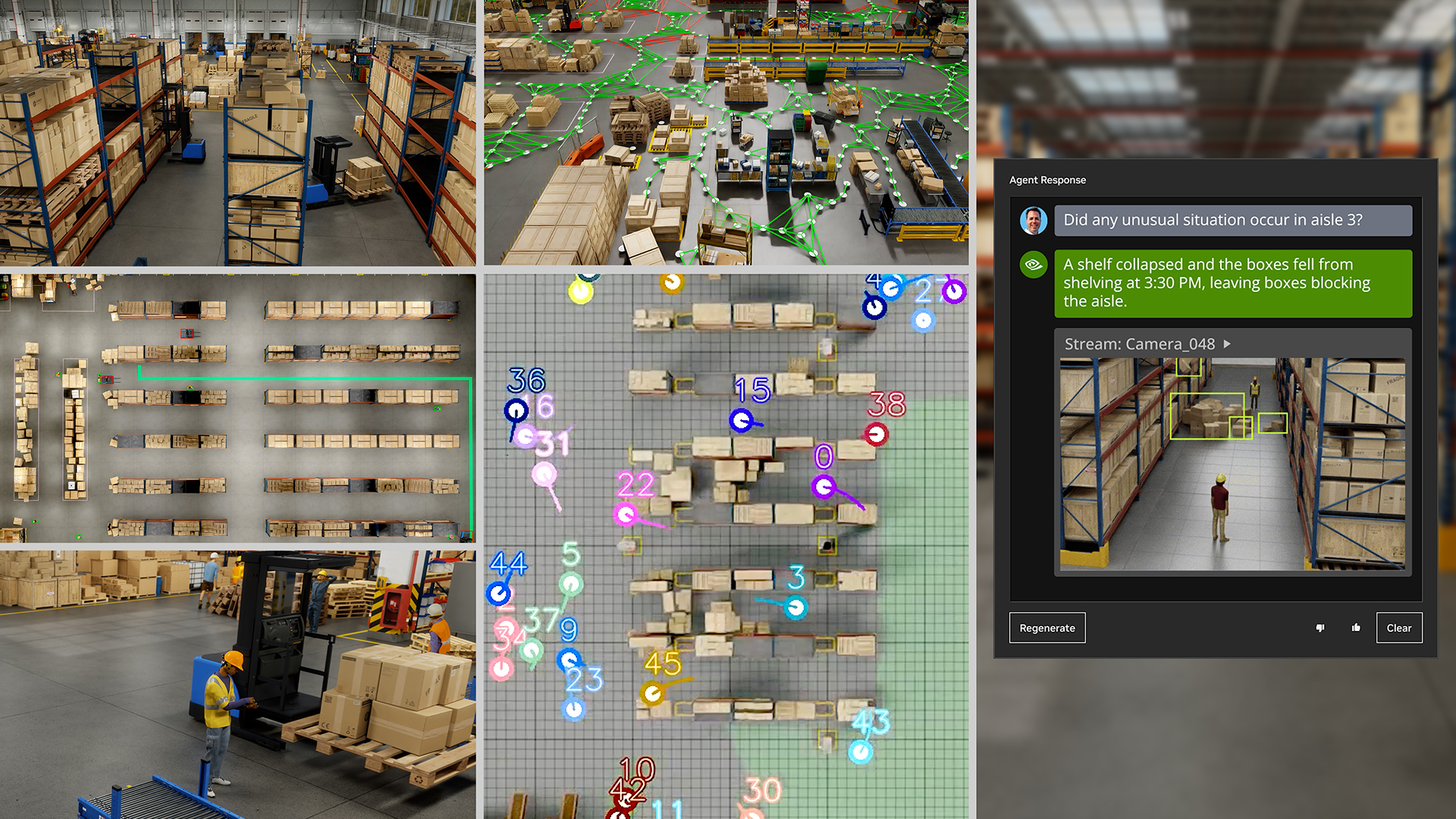
Les fabricants comme Foxconn ou les entreprises de logistique comme Amazon Robotics peuvent orchestrer des équipes de robots autonomes qui fonctionnent aux côtés de travailleurs humains et surveillent les opérations d’une usine à l’aide de centaines ou milliers de capteurs.
Ces entrepôts, usines et manufactures autonomes seront équipés de jumeaux numériques. Les jumeaux numériques sont utilisés dans la planification et l’optimisation de la disposition, la simulation d’opérations et, plus important encore, les tests de logiciels en boucle de la flotte de robots.
Basé sur Omniverse, « Mega » est un modèle de jumeaux numériques d’usine qui permet aux entreprises industrielles de tester et d’optimiser leurs flottes de robots en simulation avant de les déployer dans des usines physiques. Cela leur permet d’assurer une intégration transparente, des performances optimales et des perturbations minimales.
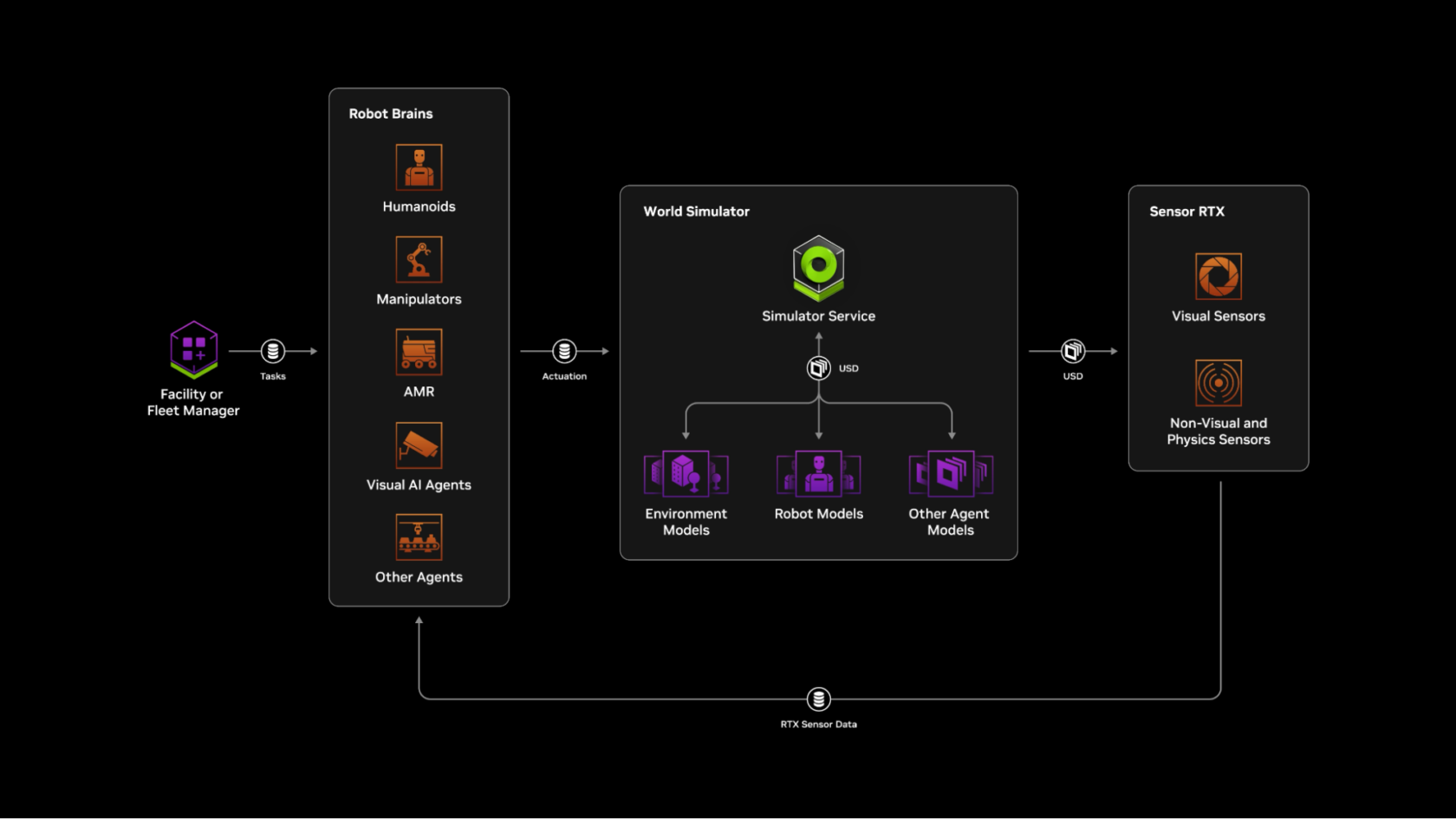
Mega permet aux développeurs d’alimenter leurs jumeaux numériques d’usine avec des robots virtuels et leurs modèles d’IA, soit le cerveau des robots. Les robots du jumeau numérique exécutent des tâches en percevant leur environnement, en raisonnant, en planifiant leur prochain mouvement et, enfin, en effectuant les actions prévues.
Ces actions sont simulées dans l’environnement numérique par le simulateur de monde dans Omniverse et les résultats sont perçus par le cerveau du robot grâce à la simulation de capteurs Omniverse.
Avec les simulations de capteurs, le cerveau du robot décide de l’action suivante, et la boucle se poursuit, tandis que Mega suit méticuleusement l’état et la position de chaque élément au sein du jumeau numérique de l’usine.
Cette méthodologie avancée de test de logiciels en boucle permet aux entreprises industrielles de simuler et de valider les changements en toute sécurité au sein du jumeau numérique Omniverse et les aide à anticiper et à atténuer les problèmes potentiels afin de réduire les risques et les coûts lors du déploiement dans le monde réel.
Habiliter l’écosystème des développeurs avec la technologie NVIDIA
NVIDIA accélère le travail de l’écosystème mondial des développeurs en robotique et des créateurs de modèles de fondation de robots avec trois ordinateurs.
Universal Robots, une filiale de Teradyne Robotics, a utilisé NVIDIA Isaac Manipulator, des bibliothèques accélérées Isaac et des modèles d’IA, ainsi que NVIDIA Jetson Orin pour construire UR AI Accelerator, une boîte à outils matérielle et logicielle prête à l’emploi qui permet aux développeurs de robots de créer des applications, d’accélérer le développement et de réduire les délais de mise sur le marché de produits IA.
RGo Robotics a utilisé NVIDIA Isaac Perceptor pour aider ses AMR wheel.me à fonctionner partout en tout temps, et à prendre des décisions intelligentes en leur donnant une perception comparable à celle des humains et des informations visuelles et spatiales.
Les constructeurs de robots humanoïdes comme 1X Technologies, Agility Robotics, Apptronik, Boston Dynamics, Fourier, Galbot, Mentee, Sanctuary AI, Unitree Robotics et XPENG Robotics adoptent la plateforme de développement robotique NVIDIA.
Boston Dynamics utilise Isaac Sim et Isaac Lab pour construire des robots quadrupèdes et des robots humanoïdes pour accroître la productivité humaine, pallier les pénuries de main-d’œuvre et prioriser la sécurité dans les entrepôts.
Fourier exploite Isaac Sim pour entraîner des robots humanoïdes à opérer dans des domaines qui exigent des niveaux d’interaction et d’adaptabilité élevés, comme la recherche scientifique, les soins de santé et la fabrication.
À l’aide d’Isaac Lab et d’Isaac Sim, Galbot a fait progresser le développement d’un jeu de données de préhension robotique agile à grande échelle appelé DexGraspNet pouvant être appliqué à différentes mains robotiques agiles, ainsi que celui d’un environnement de simulation pour évaluer les modèles de préhension agile.
Field AI a développé des modèles de fondation multitâches et polyvalents à risques limités permettant aux robots d’opérer en toute sécurité dans des environnements de terrain extérieurs, à l’aide de la plateforme Isaac et d’Isaac Lab.
L’ère de l’IA physique est arrivée, et elle transforme l’industrie lourde et la robotique du monde entier.
Démarrez avec NVIDIA Robotics.